

 Realizzare un impasto come quello per la pizza o il pane sembra un compito semplice, dato che gli esseri umani lo fanno da millenni. Ma se si vuole che a svolgerlo sia un robot, la situazione cambia radicalmente, perché in realtà impastare fino a formare una massa più o meno sferica, poi stenderla e metterla nella teglia sono un insieme di azioni che richiedono un coordinamento e una varietà di gesti molto difficili da far apprendere e riprodurre a una macchina. Questo perché si deve agire su qualcosa che cambia continuamente e in modi non del tutto prevedibili, oltretutto utilizzando diversi tipi di strumenti come il mattarello, il tagliere e così via. Talmente difficili che, finora, tutti i tentativi erano andati a vuoto. Ma ora un team multidisciplinare di alcuni dei centri di ricerca più prestigiosi degli Stati Uniti – il Massachusetts Institute of Technology (MIT) di Boston, l’Università della California di San Diego e la Carnegie Mellon University di Pittsburgh – sembrano aver centrato l’obiettivo.
Realizzare un impasto come quello per la pizza o il pane sembra un compito semplice, dato che gli esseri umani lo fanno da millenni. Ma se si vuole che a svolgerlo sia un robot, la situazione cambia radicalmente, perché in realtà impastare fino a formare una massa più o meno sferica, poi stenderla e metterla nella teglia sono un insieme di azioni che richiedono un coordinamento e una varietà di gesti molto difficili da far apprendere e riprodurre a una macchina. Questo perché si deve agire su qualcosa che cambia continuamente e in modi non del tutto prevedibili, oltretutto utilizzando diversi tipi di strumenti come il mattarello, il tagliere e così via. Talmente difficili che, finora, tutti i tentativi erano andati a vuoto. Ma ora un team multidisciplinare di alcuni dei centri di ricerca più prestigiosi degli Stati Uniti – il Massachusetts Institute of Technology (MIT) di Boston, l’Università della California di San Diego e la Carnegie Mellon University di Pittsburgh – sembrano aver centrato l’obiettivo.
Per spiegare come ci sono riusciti, i ricercatori hanno scritto un articolo sulla rivista del MIT, accompagnando il testo con video e foto che aiutano a capire. In particolare, hanno suddiviso il processo di apprendimento del robot in due parti, assegnando a un primo algoritmo il ruolo di ‘insegnante’ e a un secondo modello di machine learning quello di ‘studente’. Il primo calcola e risolve ogni passaggio che il robot deve compiere per ottenere il risultato finale utilizzando le informazioni fornite sui diversi stati dell’impasto (per esempio: steso, in forma sferica, tagliato, intero e così via). Il secondo è una rete neurale che impara a imitare le azioni dell’algoritmo ‘insegnante’, apprendendo come e quando eseguire, anche servendosi degli utensili, una determinata azione necessaria per il raggiungimento dell’obiettivo finale, migliorando ogni volta il procedimento. Il risultato, un sistema chiamato DiffSkill, è stato messo alla prova in tre compiti fondamentali nel corso di una simulazione.
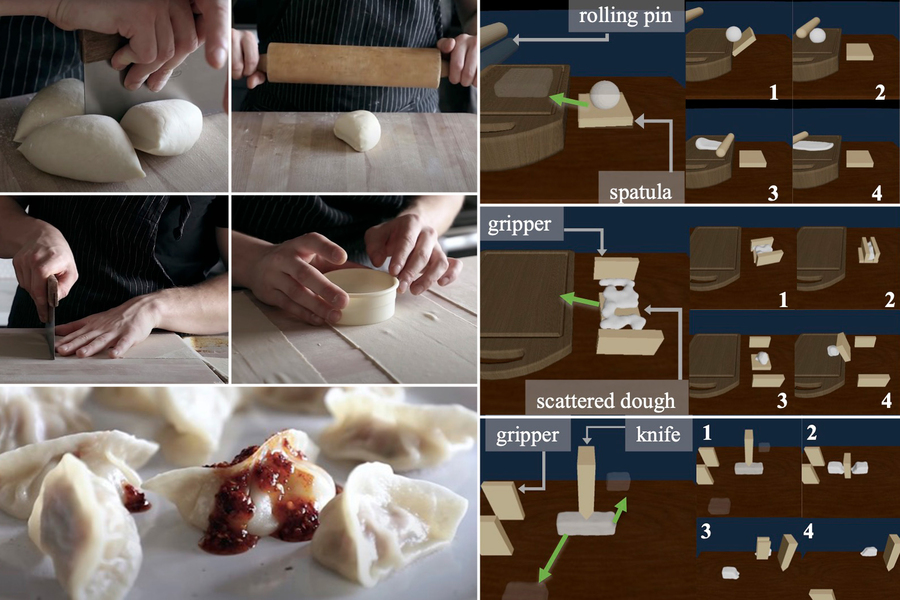
Nel primo, il robot doveva usare una spatola per spostare l’impasto su un tagliere, quindi un mattarello per appiattirlo. Nel secondo doveva utilizzare una pinza per raccogliere l’impasto da tutto il bancone, quindi posizionarlo su una spatola e da lì trasferirlo su un tagliere. Nella terza prova, il robot doveva tagliare a metà un impasto usando un coltello, e poi usare una pinza per spostare ogni pezzo in punti diversi del piano di lavoto. Ebbene, non solo il DiffSkill è stato capace di svolgere i tre tipi di compiti, ma è andato oltre: nelle prove successive, il computer-robot ‘studente’ ha appreso e migliorato le informazioni ricevute da quello ‘insegnante’, a conferma della correttezza degli algoritmi.
L’utilità di un sistema robotico di questo tipo, hanno commentato gli autori, va ben oltre la possibilità di realizzare una pizza. Visto che il robot impara a usare utensili di uso comune come una spatola, un coltello o un mattarello, potrebbe facilmente essere adattato per lavorare altri alimenti, o per esigenze particolari quali quelle di persone che hanno perso in parte o del tutto la motilità, per l’età, traumi o malattie particolari, per esempio per lavare o vestire il corpo (azioni che richiedono in parte movimenti e uso di strumenti simili). Inoltre l’uso di dati in 3D potrebbe ulteriormente migliorare le performance, fornendo informazioni molto più fedeli alla realtà. Forse non raggiungerà mai l’abilità di un pizzaiolo, ma DiffSkill potrebbe comunque essere un protagonista delle cucine dei ristoranti e delle aziende del futuro prossimo, e non solo di quelle.
© Riproduzione riservata Foto: Depositphotos, Fotolia, MIT News
Siamo un sito di giornalisti indipendenti senza un editore e senza conflitti di interesse. Da 13 anni ci occupiamo di alimenti, etichette, nutrizione, prezzi, allerte e sicurezza. L'accesso al sito è gratuito. Non accettiamo pubblicità di junk food, acqua minerale, bibite zuccherate, integratori, diete. Sostienici anche tu, basta un minuto.
Dona ora
Giornalista scientifica





